| Chapter 9. Building and Running Sample Applications | ||
|---|---|---|
 | Part II. Programming With eCos |  |
Chapter 9. Building and Running Sample Applications
Table of Contents
The example programs in this tutorial are included, along with a
Makefile, in the examples
directory of the eCos distribution. The first
program you will run is a hello world-style
application, then you will run a more complex application that
demonstrates the creation of threads and the use of cyg_thread_delay(),
and finally you will run one that uses clocks and alarm handlers.
The Makefile depends on an externally defined
variable to find the eCos library and header
files. This variable is ECOS_INSTALL_DIR and must be set
to the pathname of the install directory created in
Section 7.2, “
Configuration Tool on Windows and Linux Quick Start”.
![[Note]](pix/note.png) | Notes |
|---|---|
|
ECOS_INSTALL_DIR may be either be set in the shell
environment or may be supplied on the command line. It is set by
within shells opened by the eCos
Configuration Tool using
→ . To set it in another shell do the following in a
bash shell where
is the
base directory containing the <BASE_DIR>
_install directory
(e.g.
):$HOME/ecos-work
$ export ECOS_INSTALL_DIR=<BASE_DIR>/arm_installYou can then run make without any extra parameters to build the examples.
Alternatively, if you can do the following:
$ make ECOS_INSTALL_DIR=<BASE_DIR>/arm_install9.1. eCos Hello World
The following code is found in the file
hello.c
in the examples directory:
9.1.1. eCos hello world program listing
/* this is a simple hello world program */
#include <stdio.h>
int main(void)
{
printf("Hello, eCos world!\n");
return 0;
}To compile this or any other program that is not part of the eCos distribution, you can follow the procedures described below. Type this explicit compilation command (assuming your current working directory is also where you built the eCos kernel):
$TARGET-gcc -g -I<BASE_DIR>/install/include hello.c -L<BASE_DIR>/install/lib -Ttarget.ld -nostdlib
The compilation command above contains some standard GCC options
(for example, -g enables debugging), as well as some
mention of paths (-I
allows files like <BASE_DIR>/install/includecyg/kernel/kapi.h to be found,
and -L
allowsthe linker to find <BASE_DIR>/install/lib-Ttarget.ld).
The executable program will be called a.out.
| Note |
|---|---|
Some target systems require special options to be passed to gcc to compile correctly for that system. Please examine the Makefile in the examples directory to see if this applies to your target. |
You can now run the resulting program using GDB in exactly the
same the way you ran the test case before. The procedure will be the
same, but this time run
TARGET-gdb specifying
-nw a.out on the command line:
$ TARGET-gdb -nw a.outFor targets other than the synthetic linux target, you should now run the usual GDB commands described earlier. Once this is done, typing the command "continue" at the (gdb) prompt ("run" for simulators) will allow the program to execute and print the string "Hello, eCos world!" on your screen.
On the synthetic linux target, you may use the "run" command immediately - you do not need to connect to the target, nor use the "load" command.
9.2. A Sample Program with Two Threads
Below is a program that uses some of eCos' system calls. It
creates two threads, each of which goes into an infinite loop in which
it sleeps for a while (using cyg_thread_delay()). This code is found
in the file
twothreads.c
in the examples directory.
9.2.1. eCos two-threaded program listing
#include <cyg/kernel/kapi.h>
#include <stdio.h>
#include <math.h>
#include <stdlib.h>
/* now declare (and allocate space for) some kernel objects,
like the two threads we will use */
cyg_thread thread_s[2]; /* space for two thread objects */
char stack[2][4096]; /* space for two 4K stacks */
/* now the handles for the threads */
cyg_handle_t simple_threadA, simple_threadB;
/* and now variables for the procedure which is the thread */
cyg_thread_entry_t simple_program;
/* and now a mutex to protect calls to the C library */
cyg_mutex_t cliblock;
/* we install our own startup routine which sets up threads */
void cyg_user_start(void)
{
printf("Entering twothreads' cyg_user_start() function\n");
cyg_mutex_init(&cliblock);
cyg_thread_create(4, simple_program, (cyg_addrword_t) 0,
"Thread A", (void *) stack[0], 4096,
&simple_threadA, &thread_s[0]);
cyg_thread_create(4, simple_program, (cyg_addrword_t) 1,
"Thread B", (void *) stack[1], 4096,
&simple_threadB, &thread_s[1]);
cyg_thread_resume(simple_threadA);
cyg_thread_resume(simple_threadB);
}
/* this is a simple program which runs in a thread */
void simple_program(cyg_addrword_t data)
{
int message = (int) data;
int delay;
printf("Beginning execution; thread data is %d\n", message);
cyg_thread_delay(200);
for (;;) {
delay = 200 + (rand() % 50);
/* note: printf() must be protected by a call to cyg_mutex_lock() */
cyg_mutex_lock(&cliblock);
printf("Thread %d: and now a delay of %d clock ticks\n", message, delay);
cyg_mutex_unlock(&cliblock);
cyg_thread_delay(delay);
}
}When you run the program (by typing continue at the (gdb) prompt) the output should look like this:
Starting program: <BASE_DIR>/examples/twothreads.exe
Entering twothreads' cyg_user_start()
function
Beginning execution; thread data is 0
Beginning execution; thread data is 1
Thread 0: and now a delay of 240 clock ticks
Thread 1: and now a delay of 225 clock ticks
Thread 1: and now a delay of 234 clock ticks
Thread 0: and now a delay of 231 clock ticks
Thread 1: and now a delay of 224 clock ticks
Thread 0: and now a delay of 249 clock ticks
Thread 1: and now a delay of 202 clock ticks
Thread 0: and now a delay of 235 clock ticks | Note |
|---|---|
When running in a simulator the delays might be quite long. On a hardware board (where the clock speed is 100 ticks/second) the delays should average to about 2.25 seconds. In simulation, the delay will depend on the speed of the host processor and will almost always be much slower than the actual board. You might want to reduce the delay parameter when running in simulation. |
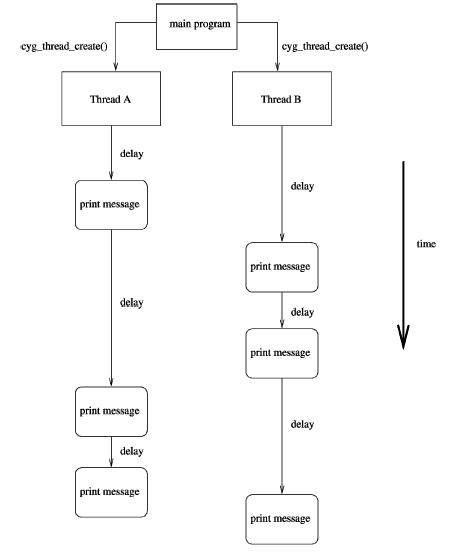
Figure 9.1, “Two
threads with simple print statements after random delays” shows how this
multitasking program executes. Note that apart from the thread
creation system calls, this program also creates and uses a
mutex for synchronization
between the printf() calls in the two
threads. This is because the C library standard I/O (by default) is
configured not to be thread-safe, which means that if more than one
thread is using standard I/O they might corrupt each other. This is
fixed by a mutual exclusion (or mutex) lockout
mechanism: the threads do not call printf() until
cyg_mutex_lock() has returned, which only happens
when the other thread calls
cyg_mutex_unlock().
You could avoid using the mutex by configuring the C library to
be thread-safe (by selecting the component
CYGSEM_LIBC_STDIO_THREAD_SAFE_STREAMS).
Figure 9.1. Two threads with simple print statements after random delays
| |  | |
| Chapter 8. Running an eCos Test Case |  | Chapter 10. More Features — Clocks and Alarm Handlers |
| 2025-10-02 | Open Publication License |